谨慎使用多线程中的fork
1. 前言
在单核时代,大家所编写的程序都是单进程/单线程程序。随着计算机硬件技术的发展,进入了多核时代后,为了降低响应时间,重复充分利用多核cpu的资源,使用多进程编程的手段逐渐被人们接受和掌握。然而因为创建一个进程代价比较大,多线程编程的手段也就逐渐被人们认可和喜爱了。
记得在我刚刚学习线程进程的时候就想,为什么很少见人把多进程和多线程结合起来使用呢,把二者结合起来不是更好吗?现在想想当初真是too young too simple,后文就主要讨论一下这个问题。
2. 进程与线程模型
进程的经典定义就是一个执行中的程序的实例。系统中的每个程序都是运行在某个进程的context中的。context是由程序正确运行所需的状态组成的,这个状态包括存放在存储器中的程序的代码和数据,它的栈、通用目的寄存器的内容、程序计数器(pc)、环境变量以及打开的文件描述符的集合。
进程主要提供给上层的应用程序两个抽象:
- 一个独立的逻辑控制流,它提供一个假象,好像我们程序独占的使用处理器。
- 一个私有的虚拟地址空间,它提供一个假象,好像我们的程序独占的使用存储器系统。
线程,就是运行在进程context中的逻辑流。线程由内核自动调度。每个线程都有它自己的线程context,包括一个唯一的整数线程id、栈、栈指针、程序计数器(pc)、通用目的寄存器和条件码。每个线程和运行在同一进程内的其他线程一起共享进程context的剩余部分。这包括整个用户虚拟地址空间,它是由只读文本(代码)、读/写数据、堆以及所有的共享库代码和数据区域组成。线程也同样共享打开文件的集合。
即进程是资源管理的最小单位,而线程是程序执行的最小单位。
在linux系统中,posix线程可以「看做」为一种轻量级的进程,pthread_create创建线程和fork创建进程都是在内核中调用__clone函数创建的,只不过创建线程或进程的时候选项不同,比如是否共享虚拟地址空间、文件描述符等。
3. fork与多线程
我们知道通过fork创建的一个子进程几乎但不完全与父进程相同。子进程得到与父进程用户级虚拟地址空间相同的(但是独立的)一份拷贝,包括文本、数据和bss段、堆以及用户栈等。子进程还获得与父进程任何打开文件描述符相同的拷贝,这就意味着子进程可以读写父进程中任何打开的文件,父进程和子进程之间最大的区别在于它们有着不同的pid。
但是有一点需要注意的是,在linux中,fork的时候只复制当前线程到子进程,在fork(2)-Linux Man Page中有着这样一段相关的描述:
the child process is created with a single thread–the one that called fork. the entire virtual address space of the parent is replicated in the child, including the states of mutexes, condition variables, and other pthreads objects; the use of pthread_atfork(3) may be helpful for dealing with problems that this can cause.
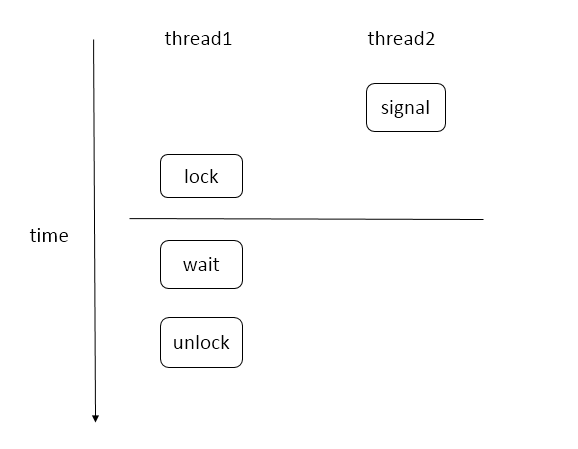
也就是说除了调用fork的线程外,其他线程在子进程中“蒸发”了。
这就是多线程中fork所带来的一切问题的根源所在了。